
工业相机如何提高输出速度
发布时间:2025-06-11 16:53:51
假如有一款相机正常输出时的速度为640FPS,使用PLUS模式时帧率可以达到1230FPS。那么如何从640FPS达到1230FPS,我们不做过多说明,只是从接口优化、配置及系统设计等方面来谈一下工业相机如何提高输出速度。
一、优化相机参数
数据接口的总带宽是固定的,所以要提高速度,那就只能减小每帧图像的数据量才可以。
1、缩小AOI(感兴趣区域)
即减小图像输出的区域。这种方法,在工业相机中是非常常见的,即使用不同的视频模式(改变分辨率),可以有效的提高相机的速度。
原理:传输数据量=分辨率×像素深度。
示例:
全画幅1920×1200 @ 8bit → 2.3MB/帧 → 100fps需230MB/s带宽。
ROI设为640×480 → 0.3MB/帧 → 相同带宽下帧率可提升至766fps。
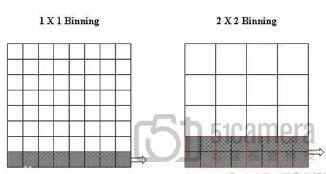
2、降低分辨率或Binning
Binning模式:2×2像素合并(牺牲分辨率,提升信噪比和速度)。
在目前的工业相机中,是比较常用的一种方法,可以有效的提高图像的输出速度。Binning是一种图像读出模式,将相邻的像元中感应的电荷加在一起,以一个像素的模式读出。Binning分为水平方向Binning和垂直方向Binning,水平方向Binning是将相邻的行的电荷加在一起读出,而垂直方向Binning是将相邻的列的电荷加在一起读出。Binning这一技术的优点是能将几个像素联合起来作为一个像素使用,提高灵敏度,输出速度,降低分辨率,当行和列同时采用Binning时,图像的纵横比并不改变,当采用2:2Binning,图像的解析度将减少75%。
3、使用上一帧图像的部分数据
这种方法早期的工业相机就有曾使用过。如隔行扫描。原理上大概是当前帧的图像只读取奇数行(或偶数行),其图像的偶数行(或奇数行)使用上一张图像的数据进行组合。这种方法在针对运动目标的检测时,会出现锯齿效应。
4、抽样采集,插值还原
这种方法,与方法2或方法3类似。也是通过抽样的方式,得到原始数据。即如果1280行的数据,那么只读取640行。然后通过插值的方法,直接计算得到另外的640行的数据。这种方法,不会出现锯齿效应,但是会降低清晰度,使图像变模糊。因为通过计算得到的数据是估计值,并不能代表真值。
5、平滑区域使用Binning、抽样等,跳变区域逐像素输出
这种方法,类似于图像处理中的轮廓分析、几何匹配、纹理分析等方法。可以对原始数据进行一次粗的扫描,如果当前区域没有太多的变化,即不存在边缘,相对比较平滑的话,那可以直接使用插值、Binning等方法输出,这样可以减少数据量。而对于有跳变,即有边缘的地方,则不使用抽样等方法,直接每个像素都输出。这样可以有效的减少数据量而又不损失图像的边缘细节。但是这其中的计算量,算法的实现,计算速度跟不跟得上,都需要考虑。能不能实现还是需要考虑的。
6、曝光与触发
最短曝光时间:曝光时间≤1/帧率(如1000fps需≤1ms曝光)。
硬件触发同步:外部触发(如编码器信号)比软件触发延迟更低。
7、像素格式
选择低比特深度:如从12bit切换为8bit,带宽需求减少33%。
二、数据传输优化
(1)协议与驱动
启用零拷贝(Zero-Copy):避免内存复制(如使用SDK的Direct Memory Access)。
禁用CPU节能模式:防止因降频导致的数据吞吐下降。
(2)多线程处理
生产者-消费者模型:单独线程负责采集,另一线程处理图像。
(3)数据压缩
无损压缩:如PNG(适合纹理简单的图像)。
有损压缩:JPEG(需权衡画质)。
三、特殊技术
(1)部分扫描(Partial Scan)
仅读取传感器有效区域(如线阵相机仅激活部分行)。
(2)FPGA预处理
在相机端完成ROI提取或二值化,减少传输数据量。
(3)PTP同步
纳秒级同步多台相机(如用于3D立体视觉)。
通过以上方法,工业相机的输出速度可显著提升,关键是根据实际需求(如分辨率、精度、延迟)平衡各项参数。
欲了解工业相机更多的信息,敬请联系:
电话:+86 13937994342
邮件:marketing@51camera.com.cn
微信公众号:51camera








