
立体工业相机提升工业自动化中的立体深度感知
发布时间:2024-12-20 10:47:23
深度感知对仓库机器人应用至关重要,尤其是在自主导航、物品拾取与放置、库存管理等方面。
通过将深度感知与各种类型的3D数据(如体积数据、点云、纹理等)相结合,仓库机器人可以在错综复杂环境中实现自主导航,物品检测,灵活避开障碍物,精准拾取目标物品,将其准确无误地放置在特定位置,同时有效优化仓库空间布局,提升作业效率。

立体成像概述
立体成像技术模拟人类视觉中的3D感知原理。人类的双眼从两个不同视角观察同一场景,可以通过视差(即两个不同视角下物体位置的位移)推断出距离。
以下是立体成像流程的关键组成部分。在立体成像系统投入使用前,必须进行一次性相机校准,如下图中的虚线部分所示。
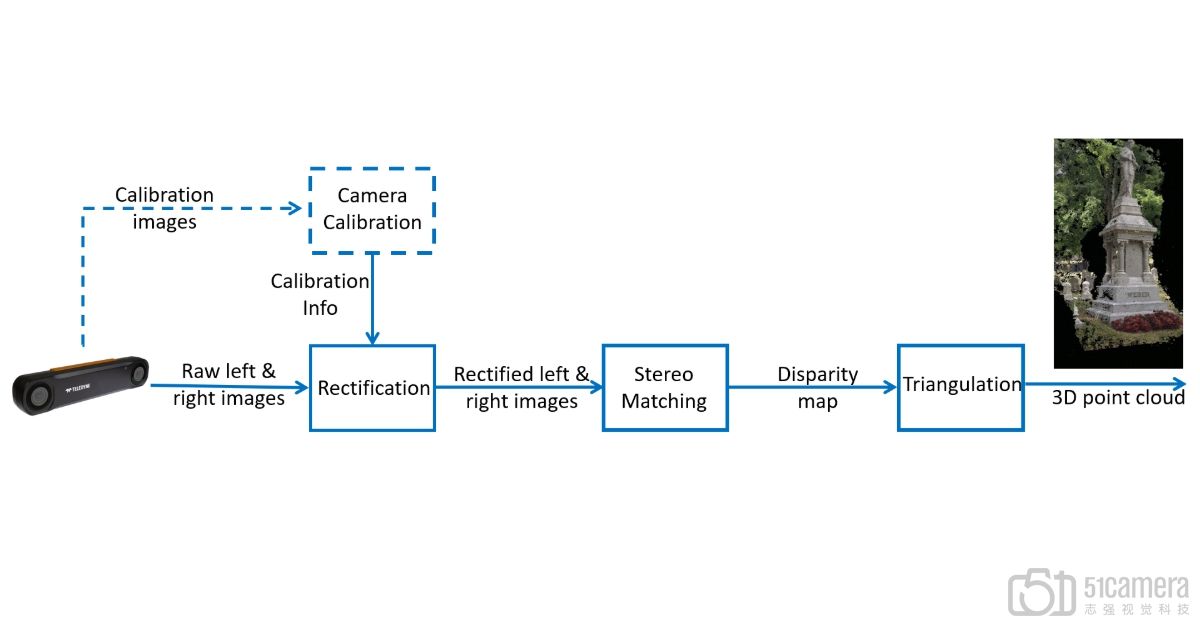
在每一帧图像中,相机首先捕捉原始的左右图像,随后,在矫正步骤中,使用前期校准得到的信息。经过矫正的图像被传递至立体匹配步骤,生成视差图。最后,通过三角测量步骤将视差图转换为3D点云。在这些步骤中,立体匹配的计算开销最为显著。然而,由于处理流程的高度并行化特性,使得这一步骤能够得到大幅优化。
立体相机的关键设计驱动因素是3D精度。深度误差由以下公式得出:ΔZ d。它取决于以下因子:
“Z” = 范围
“B” = 基线,即两台相机之间的距离
“f” = 像素中的焦距,与相机视野及图像分辨率相关。
基于此公式,深度误差随范围的增加而呈二次方增长。这是立体相机在远距离操作中面临的一个主要局限性。为了减少误差,我们可以采取多种措施,例如延长基线长度、提高分辨率或缩小视野范围。
Bumblebee X 立体工业相机赋能工业自动化
Bumblebee® X 立体相机,提供高分辨率、优异的精度和先进的板载处理能力。此外,其出色的工业设计、IP67 防护等级和 5 GigE 接口确保其能稳定集成在工业环境中。

Bumblebee X 的主要特点包括:
-
高分辨率与高精度
-
利用强大的立体算法的板载处理
-
24 厘米基线的远距离工作
-
灵活的视野选项(60、80 和 105 度)
-
具备 IP67 工业设计的高可靠性和坚固性
-
具备 5 Gigabit 以太网接口的高带宽和低延迟
-
长时间的校准保留
-
兼容外部图案投影仪
-
产品生命周期长
-
支持 ROS(机器人操作系统)和 GenICam
-
SDK功能丰富且易用
欲了解更多Teledyne FLIR IIS的工业相机信息,敬请联系:
电话:+86 13937994342
邮件:marketing@51camera.com.cn
官网:http://www.51camera.com.cn
微信公众号:51camera








